Comunicación presentada al IV Congreso de Ciudades Inteligentes
Autores
Vicente García Núñez, Jefe Departamento de Cartografía, Ayuntamiento de Madrid
Resumen
Mediante técnicas de mobile mapping, el Ayuntamiento de Madrid cartografía los túneles y pasos subterráneos de la ciudad. Un desafío técnico y de coordinación para obtener de la forma más eficiente, el trazado en tres dimensiones de todos los túneles abiertos al tráfico rodado. Por primera vez, la cartografía municipal incorpora información subterránea de detalle. Se obtiene un conjunto homogéneo de información gráfica georreferenciada, que abre un amplio abanico de posibilidades de uso para los técnicos municipales en ámbitos como el inventario y mantenimiento de la señalización, del alumbrado, de los servicios de emergencia y de cualquier instalación de los túneles, así como en las tareas de conservación. Una vez obtenido este importante conjunto de datos y trasladado a la cartografía, la utilización por todos los agentes que intervienen en los túneles y la puesta a disposición de la ciudadanía de forma abierta es el próximo hito a abordar en el proyecto.
Palabras clave
Mobile Mapping, Levantamiento de Túneles, Cartografía 3D
Antecedentes
El Ayuntamiento de Madrid elabora la cartografía municipal a escala 1:1000 que sirve de referencia para el planeamiento de la ciudad, así como para cualquier actuación topográfica a realizar en el municipio. Esta cartografía no había incorporado hasta la fecha información subterránea. La información disponible de los túneles, procedentes de las recepciones de los mismos era, si no escasa, sí heterogénea en cuanto a su soporte físico, su precisión, sus coordenadas, 2D o 3D, el grado de actualización o la correspondencia con el proyecto o con el final de obra.
Objetivos
La finalidad principal del proyecto es obtener un conjunto de datos homogéneos en tres dimensiones de todos los túneles de la ciudad.
Con esta información, el primer objetivo es incorporar a la cartografía municipal en 3D la huella de calzadas, bordillos, muros por su mayor anchura y gálibos de todos los túneles.
El segundo objetivo es poner a disposición de todos los servicios municipales esta información para su utilización en el inventario y mantenimiento de la señalización horizontal y vertical, de las redes de iluminación o de los servicios de emergencia instalados a lo largo de los túneles; mostrándose también de utilidad para la detección de filtraciones y deformaciones tanto de la superficie de rodadura como de las paredes o cubierta del túnel.
Por último, se quiere utilizar como experiencia piloto para probar la utilidad de los levantamientos por mobile mapping en la ciudad y extender su aplicación en la cartografía de ámbitos más amplios en superficie, tanto en zonas de acceso rodado como en zonas peatonales.
Proyecto
El proyecto incluye el levantamiento de los aproximadamente 200 kilómetros de túneles de la ciudad de circulación no restringida a vehículos.
Estos trabajos se encuadran, como una pieza independiente, ejecutada por la empresa COTESA, dentro del proyecto de actualización de la cartografía municipal actualmente en curso, adjudicado a la UTE EDEF-COTESA-TELESPAZIO.
El levantamiento se ha realizado a partir de las especificaciones PNOA mobile.
Para abordar el proyecto en un entorno tan complejo como este se plantearon inicialmente dos alternativas, un levantamiento por topografía clásica de precisión o un levantamiento por mobile mapping. Enseguida se descartó la primera opción, no sólo por coste y por tiempos, sino sobre todo porque resultaba inviable abordarlo por su repercusión en el tráfico de la ciudad.

Finalmente se optó por realizarlo mediante mobile mapping porque en la práctica es la única metodología que podía aportar una información precisa, homogénea, con un coste razonable y todo ello de la forma más eficiente posible para que la incidencia fuera mínima.
Por esta misma razón, se descartó, a priori, el establecimiento de bases fijas en el interior de los túneles, optando por el levantamiento a posteriori, por topografía clásica, de elementos identificados en las nubes de puntos obtenidas.
Procediendo de esta forma, los trabajos, con su importante repercusión en el tráfico, se reducen todo lo posible, centrándolos únicamente en aquellos túneles en los que son necesarios. Así también se garantiza que los puntos tomados son identificables en el levantamiento.
Metodología
Si bien el mobile mapping es una tecnología consolidada y contrastada en entornos urbanos, su aplicación en este proyecto suponía todo un reto a varios niveles.
Organizativo
Para hacer un trabajo adecuado a los objetivos marcados no basta con circular con el vehículo por los túneles y empezar a tomar datos, es necesario minimizar las ocultaciones y garantizar la mejor visibilidad posible en un entorno cerrado.
Para ello es fundamental coordinar los trabajos con los diversos servicios municipales que intervienen en los túneles.
Por una parte, con la policía municipal para restringir el tráfico, túnel a túnel, durante la toma de datos, tanto en la calzada principal como en las incorporaciones, todo ello con cuatro patrullas dedicadas que acompañan en todo momento al vehículo de la toma de datos.
Hay que destacar que los trabajos se han hecho sin cortar el tráfico en los túneles de forma permanente, sino reteniéndolo temporalmente a la misma velocidad que el vehículo de toma de datos y manteniendo la distancia necesaria para no obstaculizar la toma.
Por otra parte, también hay que coordinarlo con los servicios técnicos para garantizar la máxima iluminación en el momento de la toma, que permita obtener las mejores imágenes posibles en un entorno de poca luz.
Finalmente, hay que encajar la toma de datos con las diferentes actuaciones que puntualmente se llevan a cabo en los túneles: cortes por obras, por mantenimiento, por limpieza, por simulacros de emergencias, etc.
De planificación
Sin duda, la parte más compleja de este trabajo no es la toma de datos ni el cálculo y ajuste posterior, sino el diseño del proyecto de captura.
Un levantamiento de estas características exige la realización de un proyecto previo de toma de datos que planifique uno a uno todos los itinerarios, su secuencia, así como los recorridos óptimos de enlace entre cada túnel y el siguiente, a veces con recorridos inverosímiles para tomar un mismo túnel tantas veces como entradas o salidas tiene, todo ello con objeto de minimizar las distancias y sobre todo los tiempos de captura.
De ahí que haya sido necesario un importante trabajo preliminar de recorrido real de los posibles itinerarios hasta fijar el más adecuado.
Por si fuera poco, cada jornada había que adaptar la ejecución a los imprevistos encontrados durante la toma de datos, modificando en ocasiones tanto el orden de los itinerarios previstos para esa noche, como el de las siguientes jornadas. Todo ello hubiera sido imposible sin la experiencia, asesoramiento y apoyo de la policía municipal.

Técnico
Como es conocido, un sistema de mobile mapping consta básicamente de cuatro componentes, a saber, un GPS para el posicionamiento del sistema, un sistema de navegación compuesto por IMU y odómetro entre otros sensores, un láser escáner para la obtención de la nube de puntos 3D y un conjunto de cámaras para la toma de imágenes.
¿Y qué sucederá si durante la mayor parte del levantamiento no se dispone de GPS? Las pruebas previas parecían indicar que el comportamiento del sistema era bueno, incluso en túneles largos, pero no se sabía con certeza si la falta de GPS durante un tiempo prolongado tendría una repercusión lineal en la incertidumbre de la posición.
¿Y cuando se enlazase un túnel tras otro, o cuando la señal de GPS no fuera suficientemente buena a la entrada o a la salida, o cuando las limitaciones para la calibración del sistema en muchos puntos del trazado fueran importantes, o cuando el túnel no siguiera un trazado más o menos lineal, como en Azca o en las Cuatro Torres?
Muchas incertidumbres que han dado un punto de emoción al proyecto, muchas noches en vela y más de un dolor de cabeza al equipo técnico.
Tras varias pruebas, se optó finalmente por el sistema Pegasus de Leica que mostró un buen comportamiento, y esto es así fundamentalmente por la robustez de su sistema inercial, que ha resultado una pieza crítica en este proyecto. De fábrica ofrece una incertidumbre en la posición al cabo de 10” sin señal GPS de 0.020m RMS horizontal, 0,020m RMS vertical, 0.008º RMS pitch/roll y 0.013º RMS heading.
Para asegurar las mejores condiciones de captura, resulta imprescindible observar una absoluta rigurosidad en el seguimiento de las recomendaciones del fabricante para la toma de datos.
Para el inicio del sistema se requiere una calibración de 10´ en zonas con horizonte despejado. Hay que empezar con 5´ en estático, para obtener buena señal GPS y después 5´en dinámico, en marcha, realizando giros en forma de ocho, con acelerones y frenadas. De esta forma se sincronizan los sensores: odómetro, GNSS e IMU. Una vez calibrado, se activa el perfilómetro, que estará listo para capturar información cuando alcance sus revoluciones máximas. Cuando el sistema está parado no graba información.
Ya en circulación, antes de entrar en los túneles, sobre todo en los largos (Calle 30, María de Molina, etc.) es necesario parar hasta que el RMS es bajo y se dispone de buena señal GPS, de esta forma los sistemas inerciales y de posicionamiento se sincronizan y se ajustan.
La marcha nunca excede los 50 km/h, la conducción es suave y firme, sin cambios bruscos de dirección ni de aceleración, ya que esto provoca que los sistemas inerciales disparen sus mediciones y puedan llevar a error.
A la salida de los túneles también se para y se repite el mismo protocolo que a la entrada.
Esto ha llevado a tener una alta redundancia de datos, al ser necesario tomar la calzada principal de cada túnel tantas veces como entradas o salidas tiene, ya que si se activaba la toma de datos sólo en cada una de las entradas o salidas que no se habían tomado en la pasada anterior el resultado no era aceptable.
La toma de datos se realiza en un total de seis jornadas en horario nocturno, de 22:00 a 6:00, conforme a las restricciones establecidas por la policía municipal.
Los túneles de doble sentido se levantan al menos con una pasada en cada sentido. Se han tomado todas las entradas, salidas, accesos, ramales y bifurcaciones de cada túnel.
En aquellos túneles donde se ha obtenido la mayor incertidumbre en la posición absoluta, en la siguiente fase se obtendrán, por métodos clásicos, coordenadas de puntos identificados en el levantamiento para mejorar la precisión. La incertidumbre en la posición se distribuye del siguiente modo, según las condiciones de toma.
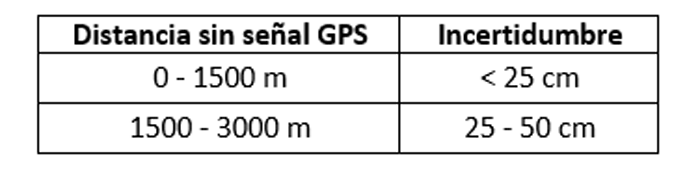
En general, no se han detectado mayores incertidumbres en Z que en X, Y.
Al obtener buenas coordenadas GPS tanto en la entrada como en la salida de cada túnel, debido al protocolo de captura seguido, se ha calculado la trazada en ambos sentidos, obteniendo en el punto medio de los túneles más largos de Calle 30, una precisión absoluta en torno a los 3 metros.
Se verifica que a partir de los 1500 metros sin señal GPS, se pierde la precisión necesaria para una cartografía 1:1000. Sin embargo, al calcular la trazada en ambos sentidos se duplica +esta distancia. De este modo se verifica que será necesario tomar puntos de control en los túneles superiores a 3000 metros, no así en el resto.
Resultados
Se ha obtenido un conjunto homogéneo de información gráfica georreferenciada que abre un amplio abanico de posibilidades de uso.
Está compuesto por los siguientes productos:
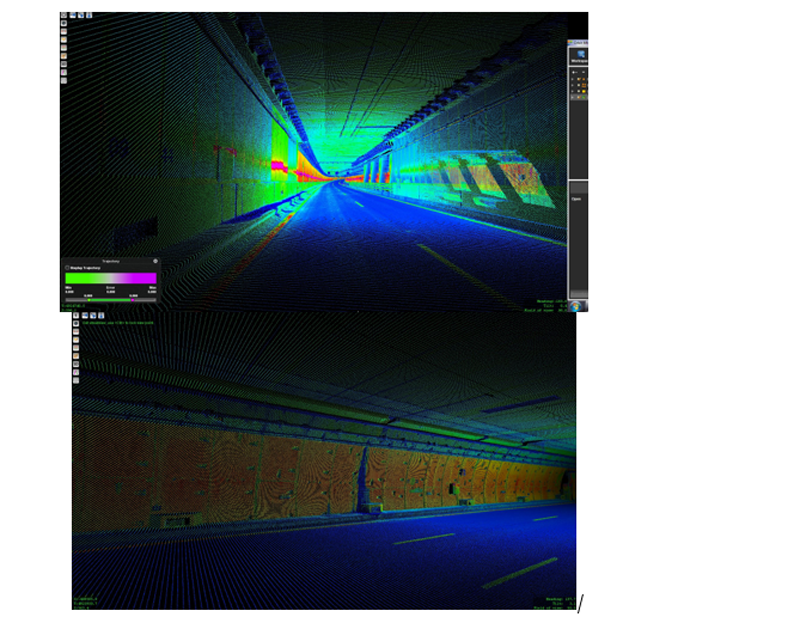
- Nube de puntos tridimensional de alta resolución.
- Imágenes 360º georreferenciadas, capturadas por las ocho cámaras del sensor cada 5 metros.
Traza tridimensional de los túneles, identificando calzadas, bordillos, muros por su mayor anchura y gálibos


De estos resultados destacamos especialmente que en la nube de puntos se distinguen con claridad elementos de diferente luminosidad, aunque no correspondan con una diferencia de relieve, por ejemplo en señalización. Esto complementa perfectamente las posibles deficiencias de imágenes obtenidas en condiciones de baja iluminación.
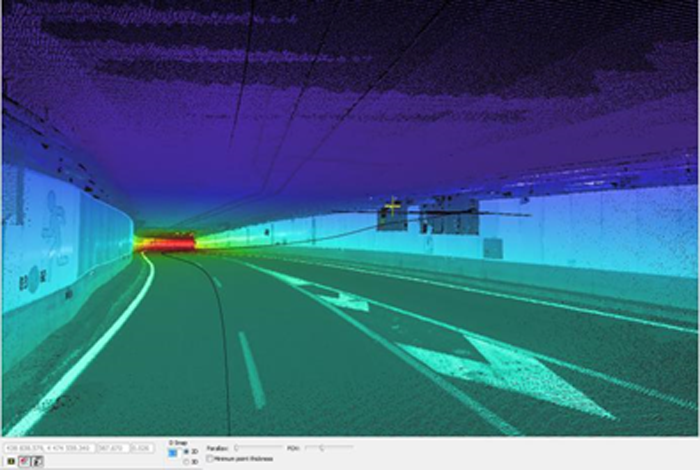
También permiten detectar humedades, filtraciones o deformaciones tanto de la superficie de rodadura, como de las paredes o de la cubierta que pueden pasar desapercibidas en las imágenes ópticas.
Conclusiones y próximos retos
El análisis conjunto de estos datos ofrece la imagen más aproximada posible de la realidad del interior de los túneles a una fecha cierta y sin duda resultará de gran utilidad para todos los agentes que actúan en ellos.
Se ha realizado de la forma más eficiente posible en cuanto a coste, tiempo e incidencia en el tráfico.
Supone una primera experiencia y contacto del Ayuntamiento con información 3D de alta resolución obtenida desde el suelo, que, combinada con la información 3D que se viene obteniendo desde hace tiempo por sensores aéreos, permitirá acercar la realidad de la ciudad, tanto a los servicios técnicos municipales como a los profesionales y a la ciudadanía y se convertirá en un futuro próximo en la información cartográfica de referencia de la ciudad, como hasta ahora lo ha venido siendo la cartografía o las fotografías aéreas.
Y sin duda, los próximos retos pasarán por:
- Mejorar la precisión de los datos obtenidos en los túneles más largos mediante el establecimiento de coordenadas de puntos de control interiores, identificables en las nubes de puntos.
- Extender su uso en el propio Ayuntamiento en aplicaciones para el mantenimiento de los inventarios de señalización, de iluminación, de equipamientos de emergencia y de cualquier otro elemento presente en los túneles, así como en la conservación de la propia infraestructura.
- Integrar la tecnología de mobile mapping con otros sensores y fuentes de información, como la fotografía aérea cenital y oblicua, que permitan disponer de una imagen de la ciudad lo más cercana posible a la realidad, a fecha cierta.
- Evaluar las necesidades técnicas y formativas que ello requiere.
Finalmente, dar a este enorme conjunto de información el máximo uso posible con su puesta a disposición para los profesionales y la ciudadanía, de forma abierta e interoperable mediante herramientas web que de forma sencilla permitan la visualización y la realización de mediciones en tres dimensiones.