Los socios del proyecto europeo CrowdBot (Safe Robot Navigation in Dense Crowds) han trabajado durante cuatro años en el desarrollo de demostradores de diversas funcionalidades robóticas en sus laboratorios y en su posterior integración en escenarios de prueba. Como resultado, se han validado una serie de tecnologías que permiten que los robots se muevan de forma autónoma y segura en áreas concurridas con el objetivo de habilitar nuevas aplicaciones, mejorar la aceptación pública y facilitar la elaboración de regulaciones en este ámbito.

Cada vez se utilizan más los robots para ofrecer productos y servicios. En este sentido, está aumentando la frecuencia con la que se encuentran con multitudes de personas, lo que genera desafíos tanto logísticos y de seguridad como éticos.
En el caso de los robots de reparto, suelen estar programados para llegar a su destino con rapidez, evitando provocar perturbaciones. Por su parte, los de ayuda a la movilidad tienen que orientarse en entornos dinámicos y facilitar la interacción. La seguridad que inspiran en la ciudadanía influye en su aceptación pública, por lo que es necesario garantizar una interacción segura entre los robots y las personas.

En este contexto, nació el proyecto CrowdBot, desarrollado desde el 1 de enero de 2018 al 31 de diciembre de 2021, con un presupuesto de 3.997.660 euros financiado en su totalidad por el programa de I+D+i Horizonte 2020 de la Unión Europea y con la coordinación del Institut National de Recherche en Informatique et en Automatique (INRIA) de Francia.
El Servicio de Información Comunitario sobre Investigación y Desarrollo de la UE (Cordis, por sus siglas en inglés) publicó el pasado mes de junio los resultados del proyecto, que ha desarrollado una serie de tecnologías capaces de garantizar un contacto estrecho seguro con las personas.
Detección, predicción de multitudes y control
Hasta el momento, los robots no se acercaban demasiado a las personas, pues estaban programados para detenerse cuando un humano o un obstáculo se aproximaba a fin de evitar el contacto mientras se mueven. Esto ha propiciado que los robots no entren en áreas concurridas ni funcionen de manera efectiva en entornos altamente dinámicos. Sin embargo, a medida que pasen a formar parte de la vida cotidiana este planteamiento ya no será válido.

CrowdBot ha seguido tres líneas de trabajo principales para desarrollar nuevas capacidades robóticas que les permitan moverse de una manera segura y socialmente aceptable con el fin de demostrar sus propios planteamientos a través de una experimentación innovadora.
Se trataba de lograr cambios graduales en habilidades de detección robótica para estimar el movimiento de la multitud del entorno, habilidades cognitivas para predecir la evolución a corto plazo de las multitudes, y navegación y control del robot para moverse de forma segura a corta distancia de las personas. El cambio de paradigma propuesto por el proyecto aporta datos previos a las decisiones técnicas de los desarrolladores de software.
Robots probados en el proyecto
Los socios de la iniciativa desarrollaron componentes de software abierto y demostradores de distintas funcionalidades robóticas en sus laboratorios, que después integraron en escenarios de prueba. En el ámbito de la movilidad, los elementos robóticos no siempre son evidentes, el comportamiento de los robots suele estar determinado por una combinación de los usuarios y la programación, y la proximidad con las personas es un requisito previo.
En esta línea, la University College de Londres integró sus tecnologías en sillas de ruedas con motor y la Escuela Politécnica Federal de Lausana (EPFL) empleó un nuevo prototipo de robot japonés denominado Qolo, en el que los usuarios se ponen de pie sobre el dispositivo.
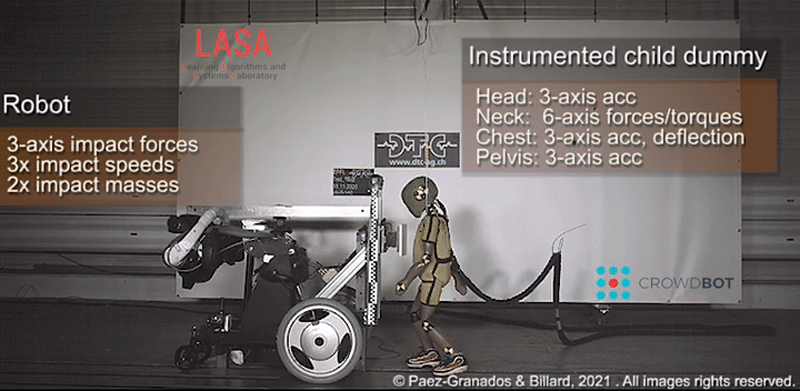
Qolo, provisto de un programa de control de dos niveles que ajusta la trayectoria para evitar choques, también podía limitar las fuerzas del impacto mediante la detección del contacto a través de sensores que recogen señales gestuales, acústicas y táctiles. Este robot se probó en las calles y los mercados al aire libre de la ciudad suiza de Lausana mediante experimentos como pruebas de choque entre Qolo y maniquíes.
Por su parte, SBRE, Locomotec y ETHZ probaron robots de servicio. Locomotec trabajó con su propio robot, CuyBot, mientras que ETHZ y SBRE testaron el robot humanoide Pepper, diseñado para interactuar con personas en público.
CuyBot puede ejecutar de manera segura una variedad de tareas de servicio y logística. Además de los sensores robóticos clásicos, como escáner láser y cámara 3D, dispone de una serie de sensores capacitivos y de fuerza que registran contactos en el entorno del dispositivo. Asimismo, un nuevo tipo de unidades de accionamiento llamadas SmartWheels permite un movimiento omnidireccional y, a pesar de su tamaño compacto, cuenta con una alta capacidad de carga.
En cuanto a Pepper, equipado con detección adicional y capacidades de procesamiento, un rastreador integrado a bordo y un sistema de localización mejorado, se probó en distintos escenarios dinámicos como en una fiesta de Navidad de laboratorio para estudiar su interacción con los humanos al orientarse entre la multitud, incluidos los gestos, el tacto y el habla.

Asimismo, el robot se integró en escenarios de prueba de realidad virtual. Como resultado de las conclusiones de los ensayos, se realizaron mejoras en el diseño y las funciones de control del dispositivo.
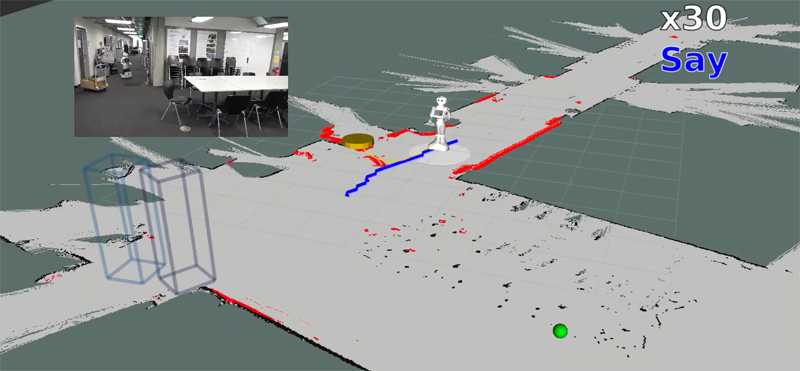
En ambos escenarios, CrowdBot utilizó una combinación de cámara y sensores LiDAR integrados con los rastreadores. Con el objetivo de predecir con precisión el comportamiento de la multitud, se desarrollaron técnicas de deep learning para extrapolarlo a partir de los datos de rastreo bidimensionales generados por el movimiento de las personas que rodeaban a los robots. Al final del proyecto, el equipo también procedió a evaluar el rastreo de todo el cuerpo.
Regulaciones y políticas en el ámbito de la robótica
La aceleración del despliegue de los vehículos autónomos pone de manifiesto que los robots en los espacios públicos serán una realidad en un futuro próximo, lo que conlleva debates en torno a su regulación.
Hasta ahora, se tenía poca información sobre los movimientos de los robots en multitudes. En este sentido, el proyecto CrowdBot ha querido priorizar la interacción y centrarse en las reacciones del robot, pero la reacción de las multitudes ante los robots dependerá de la comprensión de su propósito, un aspecto fundamental para la formulación de políticas en este ámbito.
Los socios de CrowdBot ya han integrado los resultados del proyecto en sus robots. Es el caso de la EPFL, que ha adoptado medidas de control para evitar colisiones; y de la Universidad Técnica de Aquisgrán (Alemania), que ha mejorado las capacidades de detección.
Según declaraciones de Julien Pettre, coordinador del proyecto, «aunque trabajamos con robots que ya existen, el siguiente paso sería diseñar uno mejor desde cero». De esta manera, al ampliar el campo de operación de los robots hacia entornos concurridos, se habilitan posibilidades para nuevas aplicaciones, como la gestión del tráfico de multitudes asistida.