El Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del Instituto Tecnológico de Massachusetts (MIT) y el Centro de Inteligencia Artificial del Instituto de Investigación en Computación de Qatar (QCRI) han desarrollado un modelo de deep learning que identifica mapas de riesgo de alta resolución y predice accidentes. Estos mapas se basan en datos históricos de accidentes, imágenes satelitales, mapas de carreteras y trazados GPS.
Los mapas de riesgo desarrollados por científicos del MIT y el QCRI están compuestos por celdas de cuadrícula de 5×5 metros, una resolución que aporta una gran claridad. Se trata de herramientas que pueden ayudar a los gestores urbanos a diseñar carreteras más seguras e incluso predecir accidentes futuros, además de contribuir a determinar itinerarios más seguros y facilitar a las compañías de seguros la elaboración de planes personalizados basados en los trayectos habituales de los clientes.
Los patrones de trayectoria GPS brindan información sobre la densidad, la velocidad y la dirección del tráfico, mientras que las imágenes de satélite describen las estructuras de la carretera, como el número de carriles, la existencia de arcén o el número de peatones. De esta manera, aunque una zona no tenga accidentes registrados, se puede identificar como de alto riesgo en base a sus patrones de tráfico y topología.
Planificación urbana y formulación de políticas
Para evaluar el modelo de deep learning, los investigadores utilizaron datos de accidentes de 2017 y 2018 y probaron su desempeño en la predicción de choques en 2019 y 2020. Muchas ubicaciones que se identificaron como de algo riesgo, aunque no tenían accidentes registrados, experimentaron choques durante los años de seguimiento.
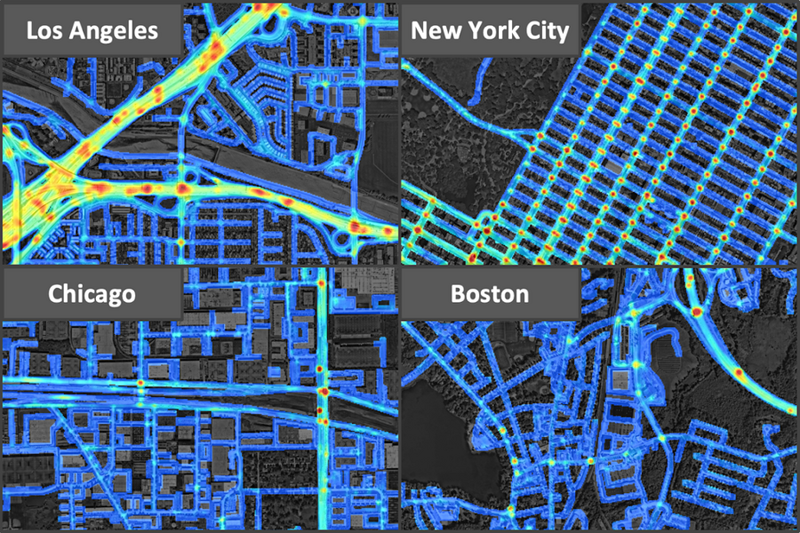
El conjunto de datos cubrió 7.500 kilómetros cuadrados de Los Ángeles, Nueva York, Chicago y Boston, en Estados Unidos. De las cuatro ciudades, Los Ángeles resultó ser la más insegura, ya que tenía la mayor densidad de accidentes.
Según los autores del estudio, se trata de un modelo escalable a otras ciudades, ya que puede ser utilizado para producir un mapa de riesgo útil incluso en ausencia de datos históricos de accidentes, lo que podría traducirse en un uso positivo para la planificación urbana y la formulación de políticas.